Yanjia Huang
Texas A&M University · Graduate Research Assistant · Robotics & Embodied AI

I am Yanjia Huang, an M.S. student in Mechanical Engineering at Texas A&M University, where I am a member of the TACO Group led by Prof. Zhengzhong Tu. My research explores how world model, policy learning from videos can be woven together to produce robust, long-horizon plans for Embodied Agents, from indoor navigation to dexterous manipulation.
Prior to my graduate studies at Texas A&M, I completed a dual-degree program in Mechanical Engineering at the Sino-British College (SBC), USST and Liverpool John Moores University (LJMU), where I also pursued a minor in Physics. My passion for research was ignited during my time as a research assistant with Prof. Yanwei Fu at Fudan University and at NYU’s AI4CE Lab (advised by Prof. Chen Feng) and Multimedia and Visual Computing Lab (MMVC) (advised by Prof. Yi Fang). This passion was further solidified during my internship at Huawei’s Noah’s Ark Lab, mentored by Hang Xu.
Get full curriculum vitae here.
Outside of research, I’m fond of Bach, play piano and guitar, read Oscar Wilde’s poetry and the Stoics, and unwind with basketball, cycling, and the occasional daydream.
“Robots shouldn’t just imitate; they could imagine, reason, and plan.”
News
- [01/2026] 2 papers accepted at ICRA 2026 — thanks to all co-authors! See you in Vienna.
- [01/2026] Joined Axis.AI to work on sim2real data challenges.
- [11/2025] Started a visiting student position at the AIVC Lab at UCLA.
- [03/2025] Our paper PANDORA: Diffusion Policy Learning for Dexterous Robotic Piano Playing was accepted to the NeurIPS AI4Music workshop.
- [09/2024] Joined the TACO Group at Texas A&M University as a graduate research assistant.
- [06/2024] Graduated with a dual B.Eng. degree in Mechanical Engineering from Liverpool John Moores University (LJMU) and the Sino-British College (SBC), USST.
Featured Publications
Learn2Fold: Structured Origami Generation with World Model Planning
Yanjia Huang, Yunuo Chen, Ying Jiang, Jinru Han, Zhengzhong Tu, Yin Yang, & Chenfanfu Jiang
arXiv preprint, 2026
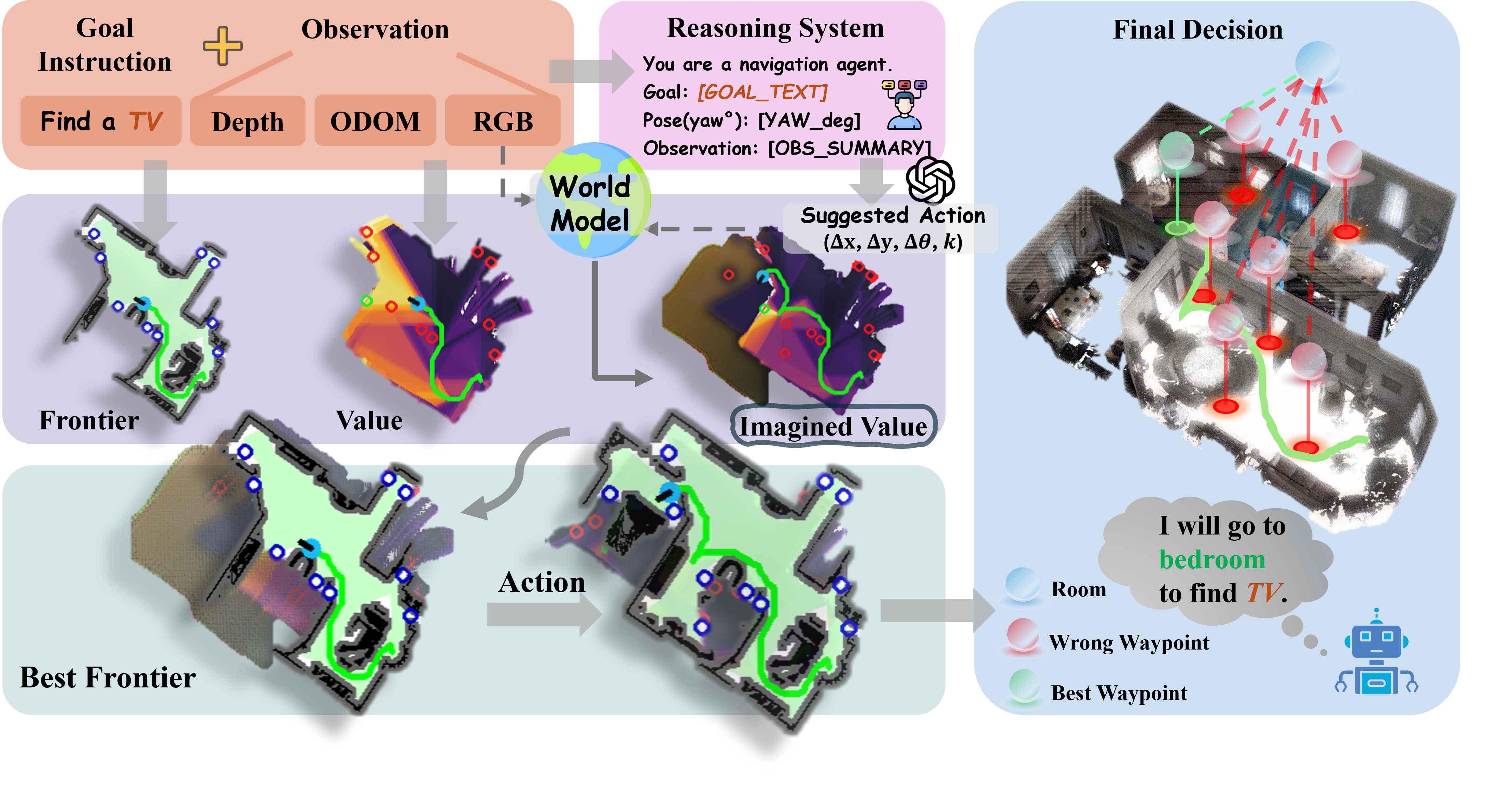
VISTAv2: World Imagination for Indoor Vision-and-Language Navigation
Yanjia Huang, Xianshun Jiang, Xiangbo Gao, Mingyang Wu, & Zhengzhong Tu
arXiv preprint, 2025
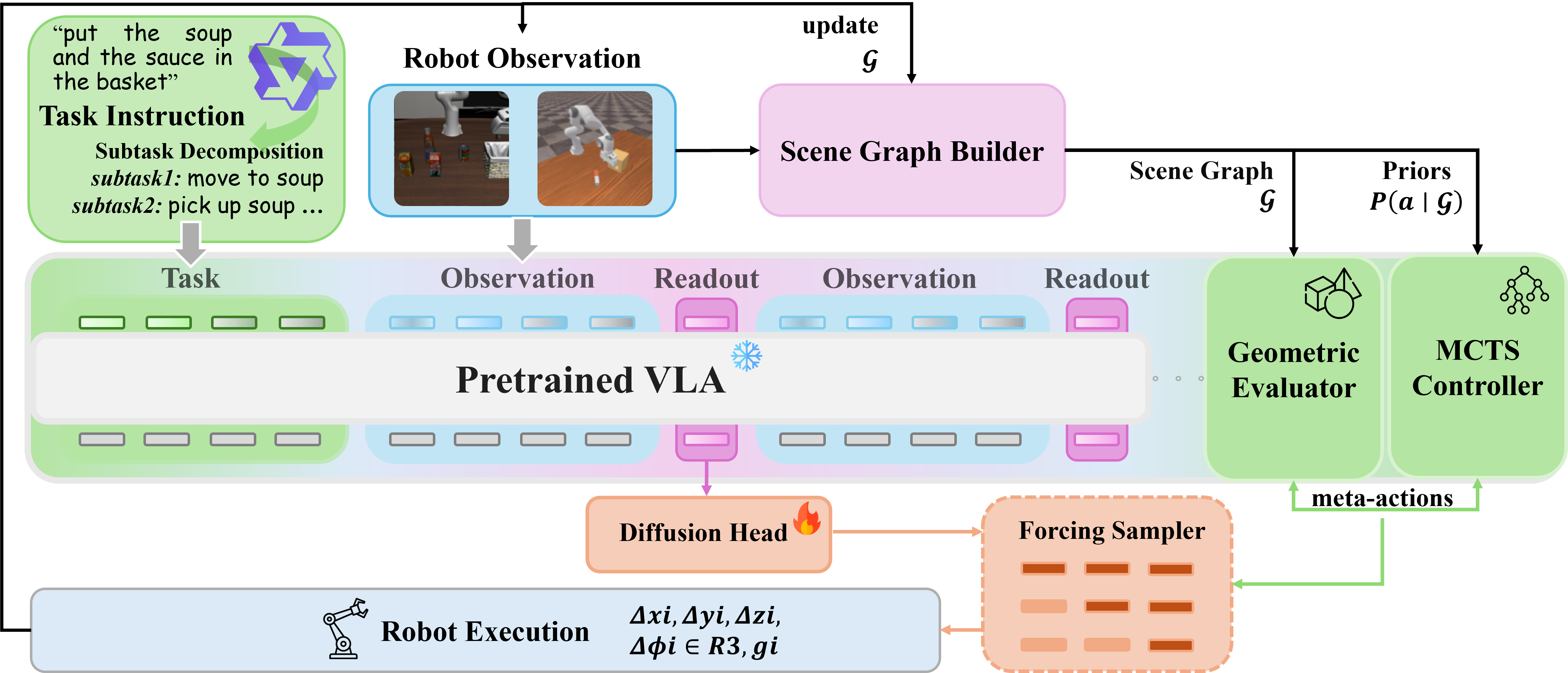
FORGE-Tree: Diffusion-Forcing Tree Search for Long-Horizon Robot Manipulation
Yanjia Huang, Shuo Liu, Sheng Liu, Qingxiao Xu, Mingyang Wu, Xiangbo Gao, & Zhengzhong Tu
arXiv preprint, 2025
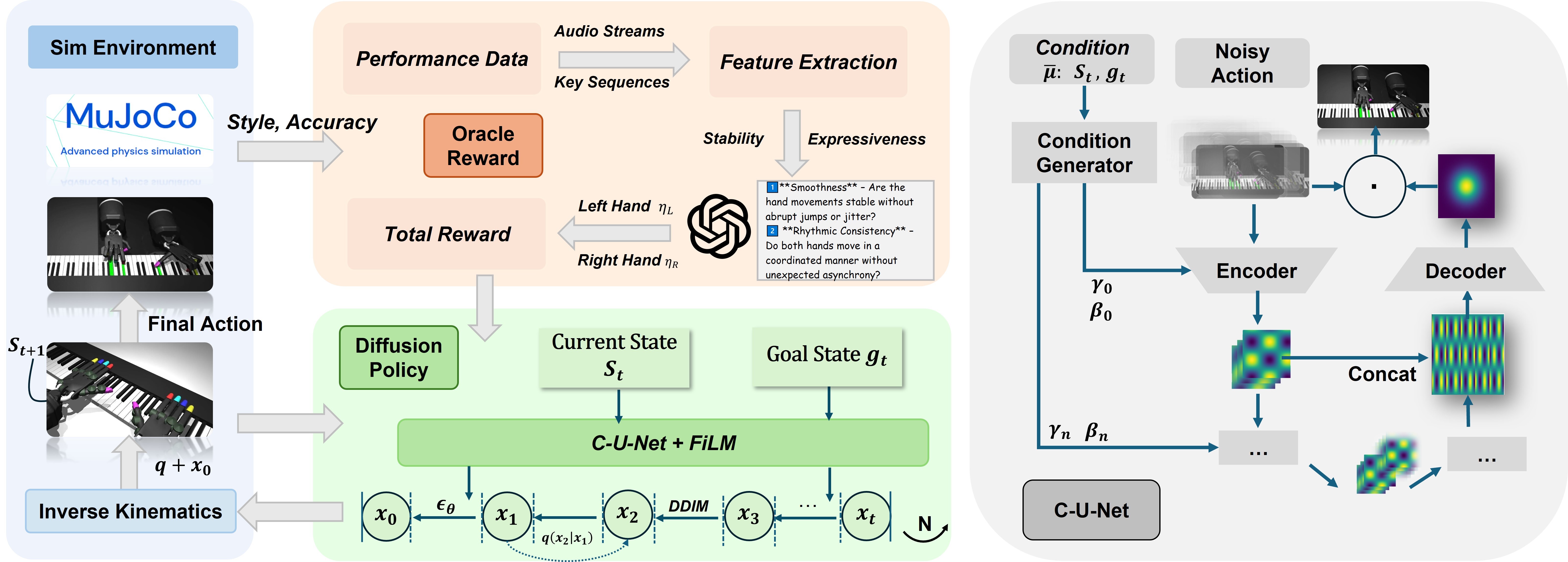
PANDORA: Diffusion Policy Learning for Dexterous Robotic Piano Playing
Yanjia Huang, Renjie Li, & Zhengzhong Tu
NeurIPS 2025 Workshop AI4Music, IROS 2025
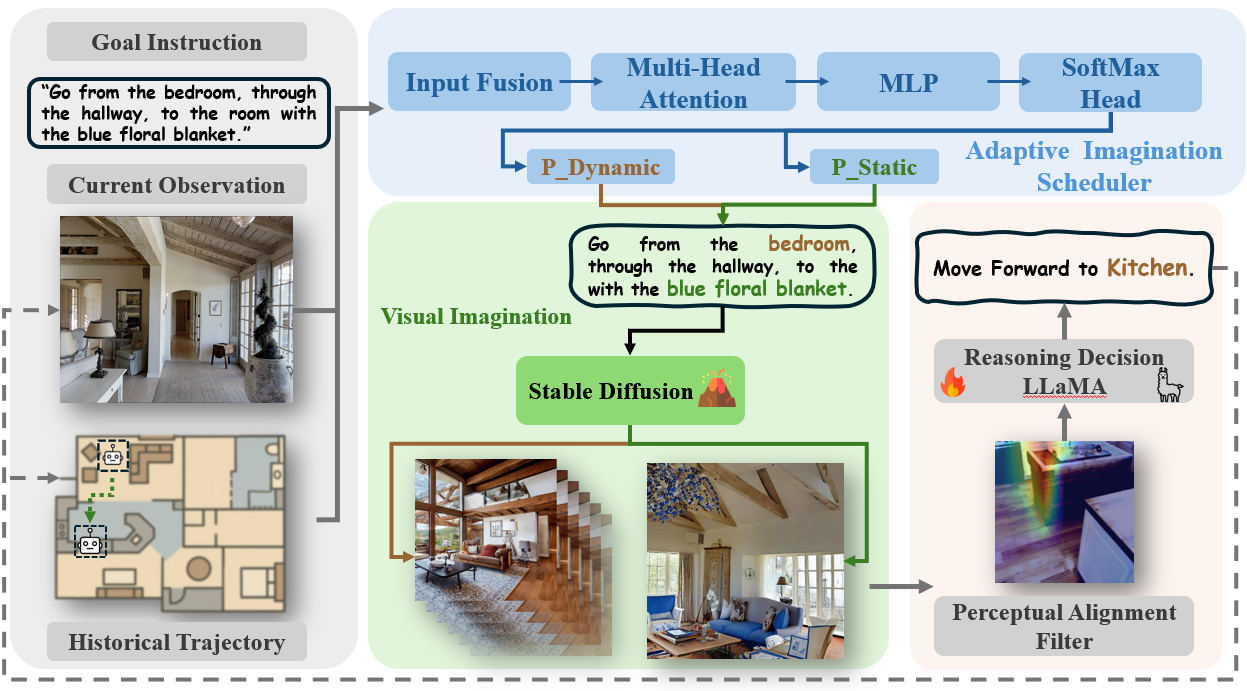
VISTA: Generative Visual Imagination for Vision-and-Language Navigation
Yanjia Huang, Mingyang Wu, Renjie Li, & Zhengzhong Tu
ICRA, 2026
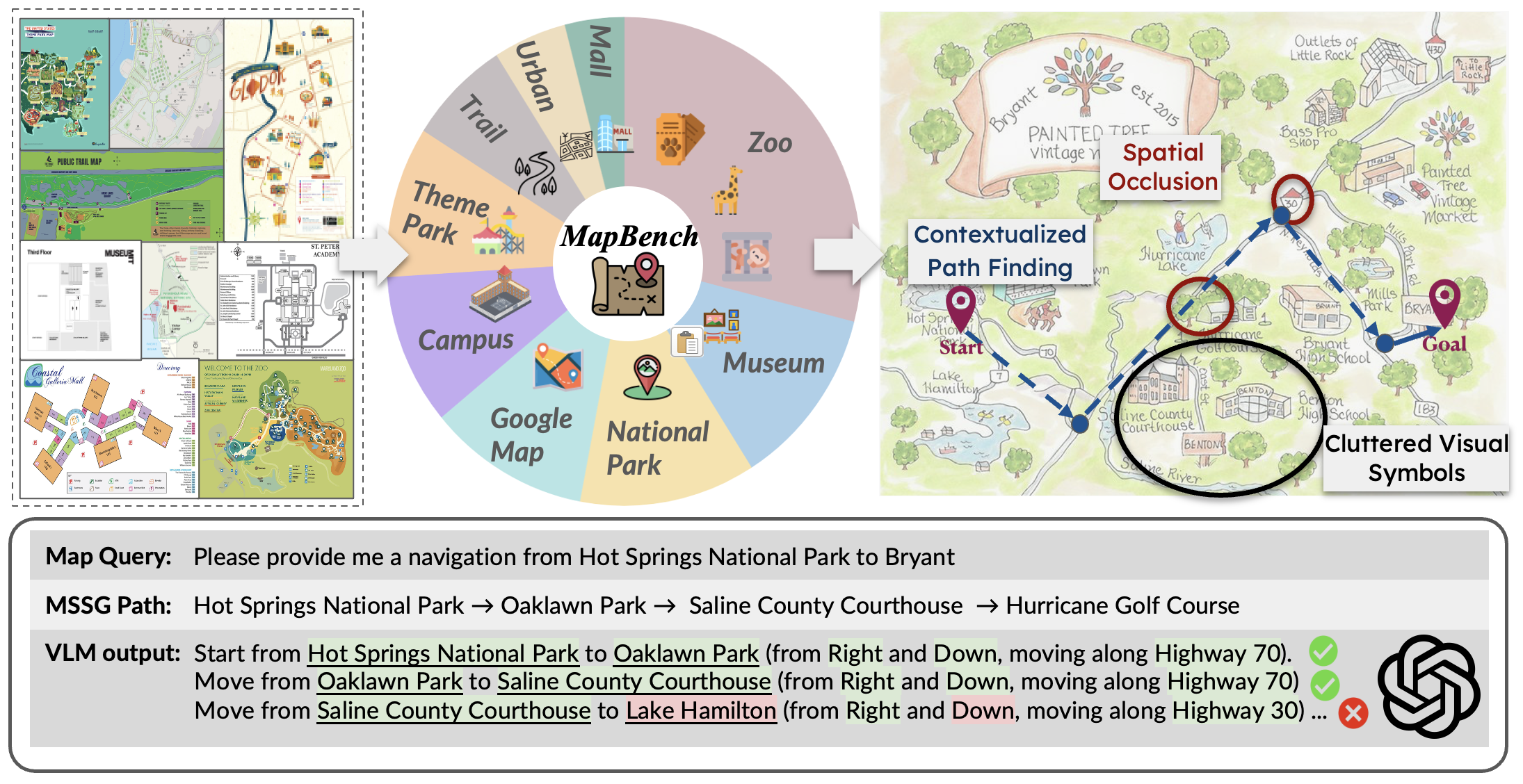
Can Large Vision Language Models Read Maps Like a Human?
Shuo Xing, Zezhou Sun, Shuangyu Xie, Kaiyuan Chen, Yanjia Huang, Yuping Wang, Jiachen Li, Dezhen Song, & Zhengzhong Tu
arXiv preprint, 2025
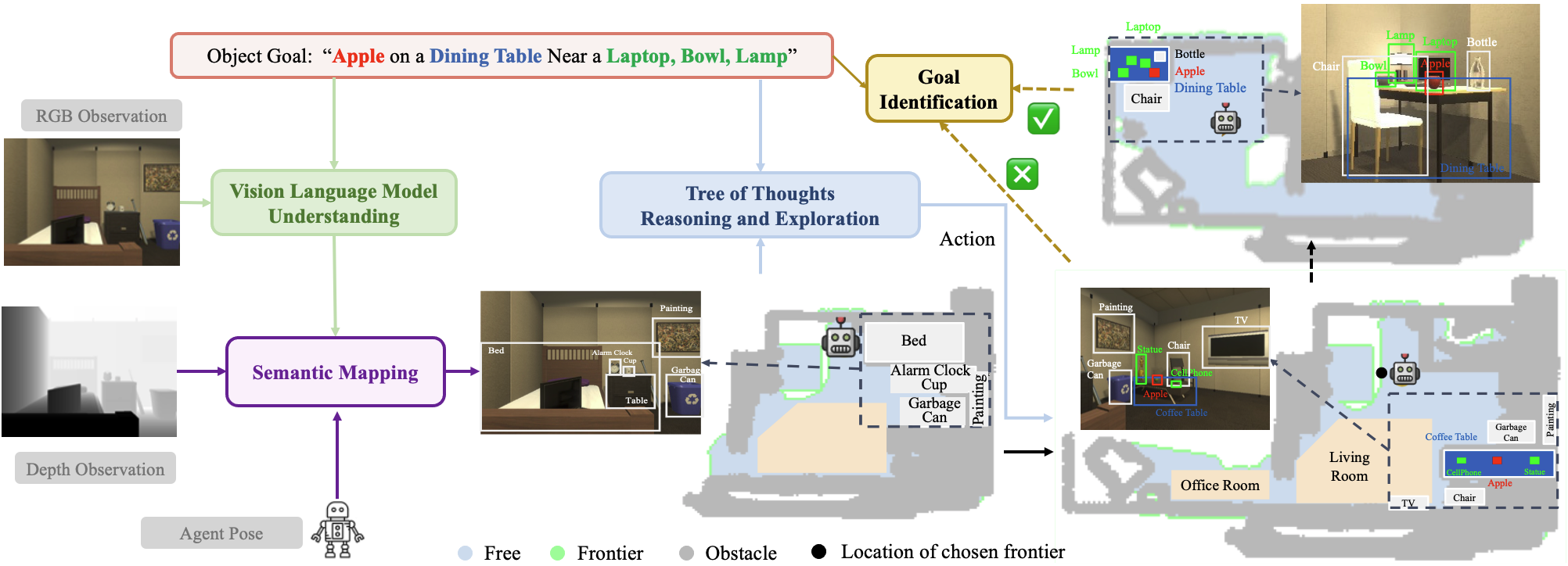
Zero-shot Object Navigation with Vision-Language Models Reasoning
Congcong Wen, Yisiyuan Huang, Yanjia Huang, Hao Huang, Shuaihang Yuan, Yu Hao, Hui Lin, Yu-Shen Liu, & Yi Fang
ICPR, 2024
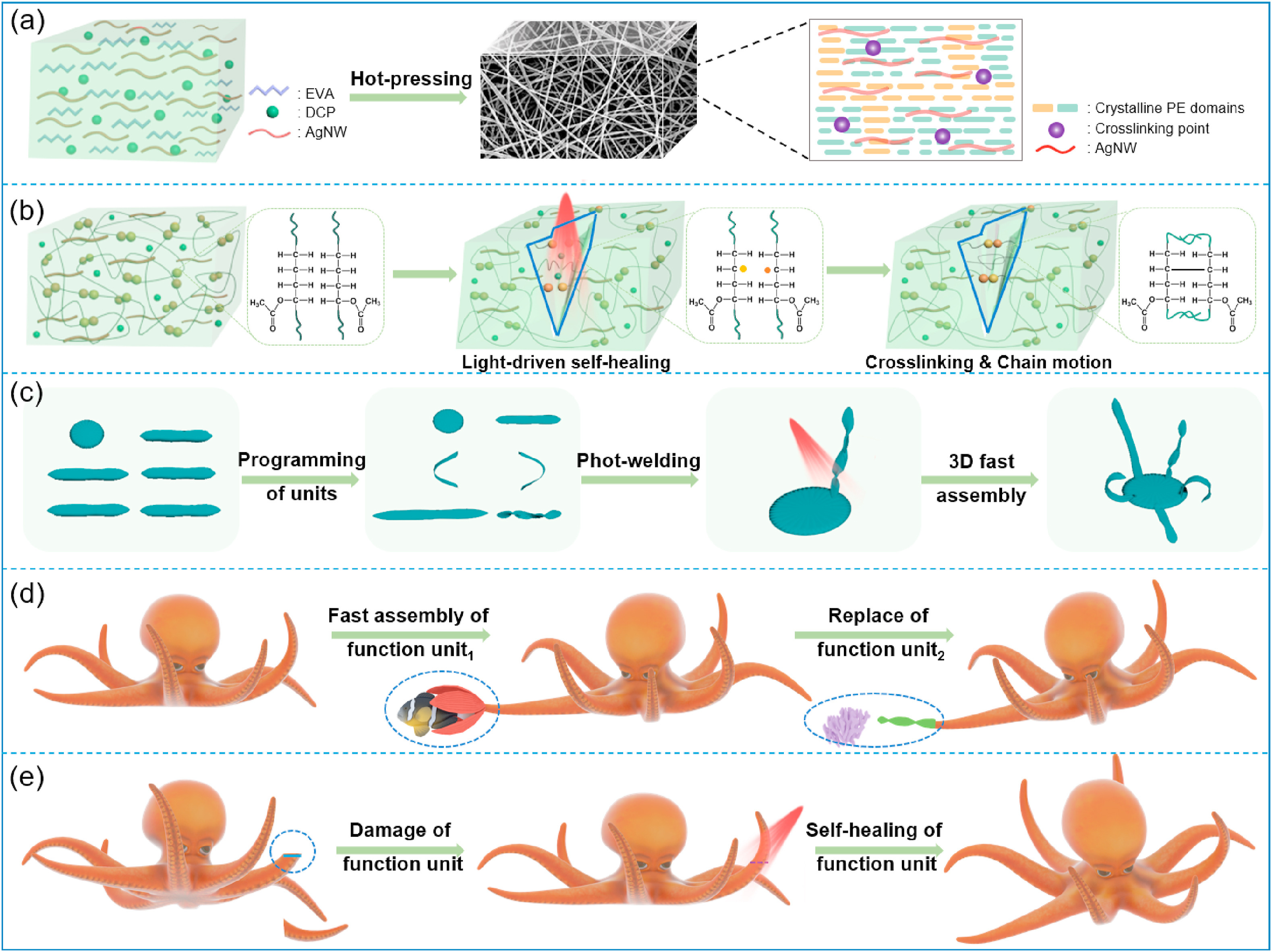
A self-healing composite actuator for multifunctional soft robot via photo-welding
Mingxia Liu, Shu Zhu, Yanjia Huang, Zihui Lin, Weiping Liu, Lili Yang, & Dengteng Ge
Composites Part B: Engineering, 2021